
Let's first look at the PID parameters that are circulated on the Internet:
Parameter tuning to find the best, from small to large
First, the ratio is post-integrated, and finally the differential is added.
The curve oscillates frequently, and the proportional disk is enlarged.
The curve floats around the big bay, and the proportional disk is small
The curve deviates slowly and the integration time decreases.
The curve has a long fluctuation period and the integration time is longer.
The curve oscillates at a fast frequency, first lowering the differential
The momentum is large and the fluctuations are slow. Derivative time should be lengthened
Ideal curve two waves, front high and low 4 to 1
When you look at the two-tone analysis, the quality of the adjustment will not be low.
It is not clear when it started to spread on the Internet.
Now look at another slogan:
The parameters are set to find the best, from large to small.
First, the ratio is post-integrated, and finally the differential is added.
The curve oscillates very frequently and the proportional disk is enlarged.
The curve floats around the big bend, and the proportional disk moves to the small plate.
The curve deviates from the recovery and the integration time decreases.
The curve has a long fluctuation period and the integration time is lengthened.
The ideal curve is two waves, and the adjustment process is of high quality.
This is a slogan for the tuning of PID parameters by the empirical method. It has been circulating for decades, and it first appeared in the book "Chemical Automation" published in November 1973. Nowadays, the rumors circulating on the Internet seem to have been supplemented and adapted from the slogan as a blueprint. For example: "The curve oscillating frequency is fast, the differential is first lowered, and the momentum is large and the fluctuation is slow. The differential time should be lengthened. "There is added:" The ideal curve is two waves. The front high is 4 to 1 lower. When you look at the second adjustment, the quality is not low."
Now dlr combines these two sputums and conducts some analysis.
In the design, setting and operation of the control system, the basis for measuring the quality of the system is the transition process of the system. When the input of the system is step change, the transition process of the system is characterized by divergence oscillation, equal amplitude oscillation, fading oscillation, monotonous process and so on. In most cases, dlr hopes to obtain a transition process of damped oscillation, and considers the transition process shown in Figure 1 to be the best and uses it as a basis for measuring the quality of the control system.
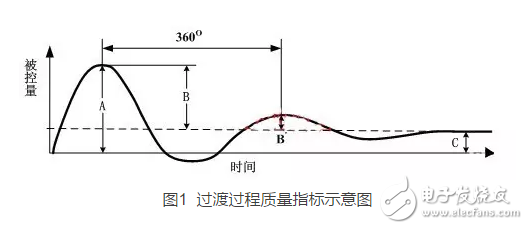
The reason for choosing this curve as the quality index of the control system is that it returns to the given value faster for the first time, but it deviates from the future, but the deviation is not large, and only a few oscillations stabilize. Quantitatively, the height of the first peak B is four times the height of the second peak B', so this curve is also called the 4:1 attenuation curve. In the adjustment of the regulator engineering, it is best to obtain a 4:1 attenuation transition process. The regulator parameters at this time can be called the optimal parameters.
Let's talk about the best parameter problem in the “parameter tuning to find the best, from large to small.†Many instrument manufacturers have this experience. In the adjustment of the project parameters of the site, if only press 4 :1 attenuation ratio is set, then there can be many pairs of proportionality and integration time can also meet the 4:1 attenuation ratio, but the values ​​of these pairs are not arbitrary combinations, but are paired, certain proportions must be A pair with a certain integration time can satisfy the conditions of the attenuation ratio, change one of them, and the other must change accordingly. Because it is in pairs, there is a "match" problem with the regulator parameters. In the actual application, dlr only adds an additional condition to select a pair of suitable values ​​from multiple pairs of values. The appropriate value for this pair is often referred to as the "best set value." The meaning of "checking" in "from big to small" is to find the best match value of the regulator parameters. The "small check from big to small" means that in the specific operation, the proportionality and integration time are first put to the maximum position, and the differential time is adjusted to zero. Because we need a transition process that attenuates the oscillations and avoids other oscillations. At the beginning of the tuning, the scale is placed at the maximum position in order to reduce the magnification of the regulator. The point is put to the maximum position, the purpose is to cancel the integral action first. Adjusting the differential time to zero also cancels the differential action. "From big to small..." is to change the proportionality or integral time scale from large to small, in essence, slowly increase the magnification of the proportional action or integral action. That is, slowly increase the influence of the proportional or integral action to avoid large oscillations in the system. Finally, depending on the actual situation of the system, decide whether to use the differential action.
"First the ratio is the post-integration, and finally the differential is added." It is the tuning step of the empirical method. The proportional effect is the most basic adjustment function. The mouth says: “First the proportional and post-integrationâ€, the purpose is to simplify the parameter setting of the regulator, that is, to cancel and weaken the integral action first, and then put the integral action into operation after the system is stable. Especially when the newly installed control system does not understand the system characteristics, the dlr needs to cancel the integral action first. After adjusting the proportionality, the control system is generally stable, and then the integral action is added. For proportional control systems, if a 4:1 attenuation transition is specified, only one proportionality can satisfy this specification, while any other scale cannot make the transition process have an attenuation ratio of 4:1. Therefore, the proportional control system only needs to find the proportionality when the 4:1 attenuation ratio is satisfied.
On the basis of adjusting the proportional control, the integral action is added, but the integral will reduce the attenuation ratio of the transition process, and the stability of the system will also decrease. In order to maintain the stability of the system, the proportionality of the regulator can be increased, that is, the magnification of the regulator is reduced. This is why dlr increases the proportion by about 20% after the integral action is applied in the tuning. The essence is the matching problem of the proportionality and the integral time value. The reduction of the proportionality within a certain range can be compensated by increasing the integration time, but it should also be seen that the proportional action and the integral action are mutually influential. If the scale of the setting is too large, even if the integration time is appropriate, the system control effect will still be poor.
Various products of CD Cases, providing product images and basic parameters with each CD Cases and CD Cases; We are a 12 year professional Chinese manufacturer of CD Cases, and look forward to your cooperation!
cd case,CD BOX ,CD COVER
Shantou Yashidar Electronic Co.LTD , https://www.headsetswireless.com